
Des robots mous qui » ressentent «
Fabriqués en matériaux souples et déformables, tels que tissus, silicones et autres polymères, les robots » mous » sont plus agiles que leurs cousins » en dur « . Leurs applications sont donc prometteuses, notamment dans les domaines scientifique et médical (exploration d’un organisme, chirurgie moins invasive…), mais pas seulement. » Nous souhaitions leur donner la capacité d’appréhender le monde en le ressentant. C’est pourquoi nous avons doté certains de sortes de peaux sensorielles. Elles leur permettent de saisir une large gamme d’objets, des plus délicats, tels que des chips, aux plus lourds, comme des bouteilles de lait « , expose Daniela Rus, professeure au Massachusetts Institute of Technology et directrice de son laboratoire d’informatique et d’intelligence artificielle.
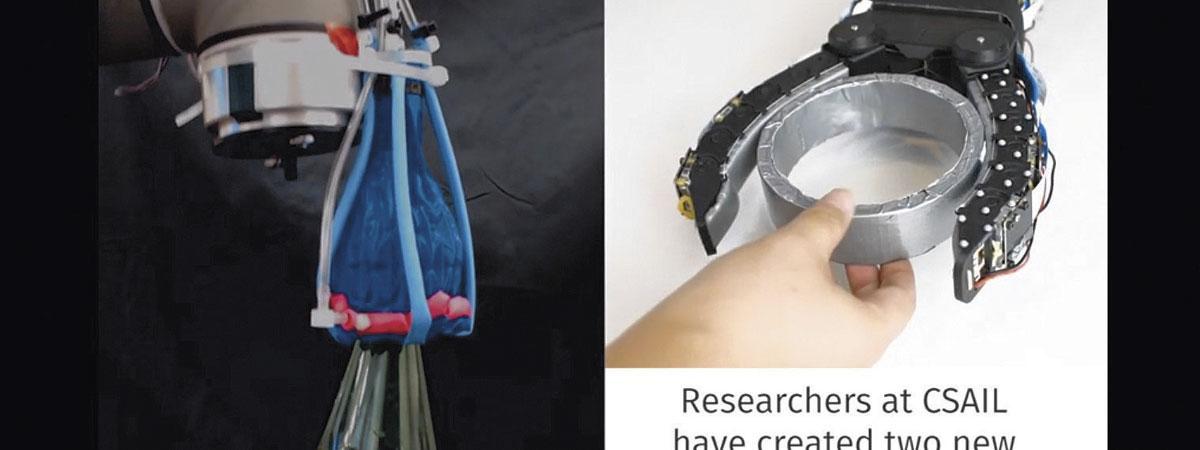
La préhension est un enjeu majeur en robotique. Des avancées importantes font l’objet de deux publications émanant du MIT. Avec l’aide de confrères de Harvard, des chercheurs du prestigieux institut ont développé une pince robotique molle en forme de cône. Son fonctionnement s’inspire de la technique de chasse de la plante carnivore, dont la mâchoire végétale, composée de deux lobes surmontés de sortes de dents, se referme violemment sur tout insecte trop curieux. Le robot mou imite cette façon de faire pour ramasser des objets pesant jusqu’à cent fois son poids.
Partant de cette prouesse, une autre équipe a amélioré le robot en tentant de lui conférer la polyvalence et l’adaptabilité d’une main humaine. Pour ce faire, les scientifiques lui ont greffé des capteurs tactiles (mesurant la pression). De quoi permettre à la pince de saisir des objets extrêmement fragiles, mais aussi de les classifier. Autrement dit, par le toucher, le robot mou est capable de comprendre la nature de ce dont il se saisit et d’adapter la force de sa prise. D’après les experts, avec un haut taux de fiabilité. En effet, le robot identifierait correctement neuf objets sur dix. » Nos capteurs tactiles souples fournissent une nouvelle méthode de détection qui pourrait être appliquée à de nombreux secteurs, notamment dans la manufacture, pour l’emballage d’objets « , avance Josie Hughes, chercheuse au MIT.
En parallèle, d’autres scientifiques de la même institution ont développé un doigt robotique en silicone, dénommé GelFlex. Afin de le doter de sens plus nuancés, plus » humains « , il a été équipé de caméras à optique grand angle fish eye. Fixées à l’extrémité du doigt, elles permettent d’en visualiser les déformations dans le détail. GelFlex comprend également un réseau de neurones deep learning, qui analysent ces informations. Montés ensemble, deux de ces doigts forment une pince, actionnée par une sorte de tendon. Et deux extensions robotiques ainsi créées sont capables de différencier des objets métalliques de différentes formes et tailles, avec un succès de plus de 96 %. Etape suivante : les chercheurs visent désormais à ajouter des capteurs basés sur la vision pour affiner encore leur invention.
Vous avez repéré une erreur ou disposez de plus d’infos? Signalez-le ici